運(yùn)動傳感器是許多電子系統(tǒng)的重要組成部分。然而,在軟電子學(xué)領(lǐng)域中,基于無疲勞軟檢測質(zhì)量的慣性運(yùn)動傳感器的開發(fā)還沒有被廣泛地探索。無毒的鎵基液態(tài)金屬是一種新興的材料,表現(xiàn)出誘人的機(jī)電特性,使其成為慣性傳感器的優(yōu)秀檢測質(zhì)量材料。在這里,我們提出并演示了一種完全軟的激光誘導(dǎo)石墨烯(LIG)和基于液態(tài)金屬的慣性傳感器,集成了溫度、濕度和呼吸傳感器。慣性傳感器設(shè)計(jì)將涂有石墨烯的液態(tài)金屬液滴限制在流體通道內(nèi),在LIG電阻電極上滾動。所提出的傳感器結(jié)構(gòu)和材料實(shí)現(xiàn)了高度可移動的檢測質(zhì)量和用于其振蕩的振動空間。該慣性傳感器具有6.52% m
-1s
2的高靈敏度和出色的可重復(fù)性(超過12500個周期)。該平臺使用可擴(kuò)展的快速激光寫入技術(shù)制造,并與可編程片上系統(tǒng)(PSoC)集成,作為獨(dú)立系統(tǒng)運(yùn)行,用于實(shí)時無線監(jiān)控運(yùn)動模式和控制機(jī)械臂。開發(fā)的印刷慣性平臺是下一代可穿戴運(yùn)動跟蹤平臺和軟人機(jī)界面的絕佳候選。
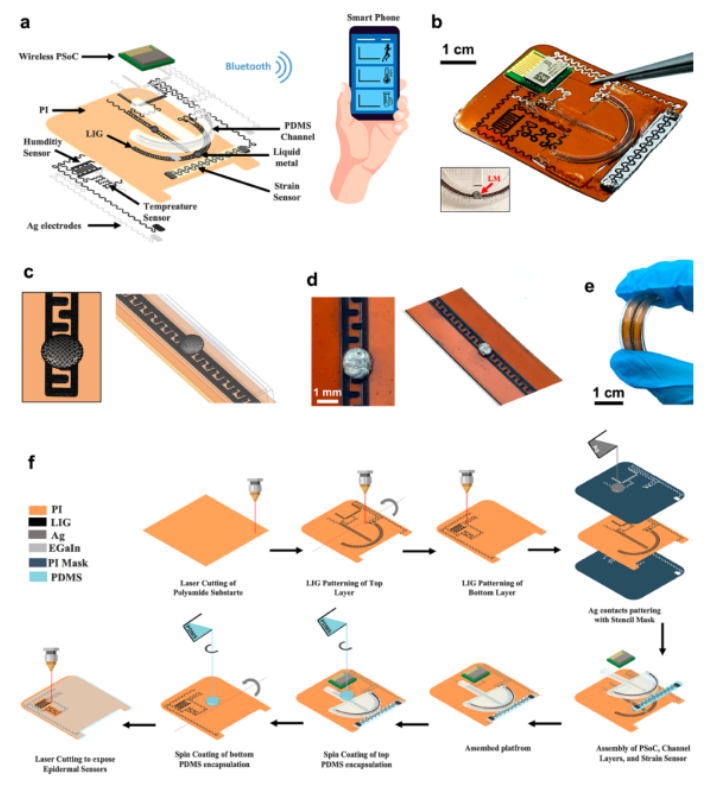
圖1. 多功能LIG平臺的概念圖、分解圖、照片和制作。(a)多功能無線平臺的概念圖,顯示了包含慣性、溫度、濕度和呼吸傳感器的平臺不同組成層的分解圖。(b)制造的多功能平臺的光學(xué)照片;插圖顯示放置在彎曲的圖案化PDMS通道內(nèi)的LM。(c和d)所制造的激光誘導(dǎo)石墨烯交叉指型電阻電極和位于其上的石墨烯涂覆的液態(tài)金屬液滴的3D示意圖和光學(xué)照片。(e)具有PDMS通道的制造的LIG襯底的照片。(f)制造開發(fā)的多功能平臺所遵循的工藝流程。
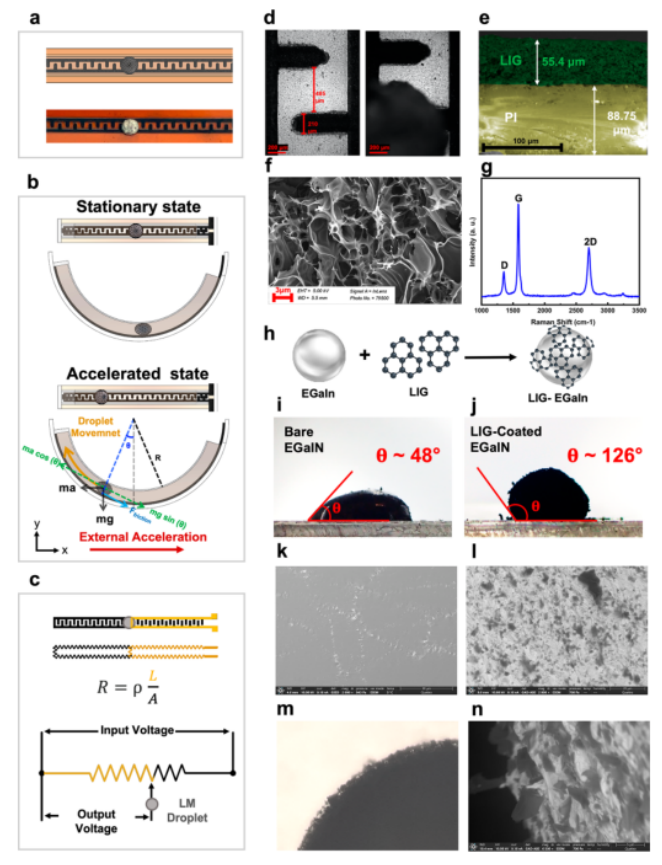
圖2. 液滴動力學(xué)和材料特性。(a)電阻LIG電極的俯視圖。(b)提議的慣性液態(tài)金屬基傳感器的側(cè)視示意圖,顯示了LM檢驗(yàn)質(zhì)量塊在靜止和加速狀態(tài)下的位置,以及在施加加速度時作用于其上的力。(c)顯示電阻傳感器的操作機(jī)制和可變電阻器LM液滴啟動概念的等效電路及其相應(yīng)測量設(shè)置的示意圖。(d)頂部顯微圖像顯示了LIG電阻電極的數(shù)字和位于其上的LM液滴。(e)橫截面掃描電子顯微鏡(SEM)圖像,顯示了在輻照過的聚酰胺膜的頂部產(chǎn)生的多孔LIG網(wǎng)絡(luò)。(f)顯示生成的石墨烯薄片的高倍俯視SEM圖像。(g)拉曼光譜LIG電極獲得473 nm波長的激光。(h)顯示產(chǎn)生LIG涂覆的EGaIn液滴的涂覆過程的示意圖。(I和j)在PDMS基底上制作的裸和涂LIG的EGaIn的接觸角。(k和l)環(huán)境SEM (ESEM)頂部圖像顯示了裸露的和LIG涂覆的EGaIn液滴的表面。(m)涂有光的LM檢驗(yàn)質(zhì)量的顯微圖像,顯示了涂覆液滴液體核心的巢狀石墨烯結(jié)構(gòu)。(n)涂有LIG的LM的高倍ESEM圖像,顯示石墨烯薄片粘附到LM的天然氧化物層上。(o)通過控制led的強(qiáng)度和作為LM微滴位置的函數(shù)的電極的相應(yīng)電阻變化,使LM激活的可變電阻器概念可視化的時間推移順序圖像。
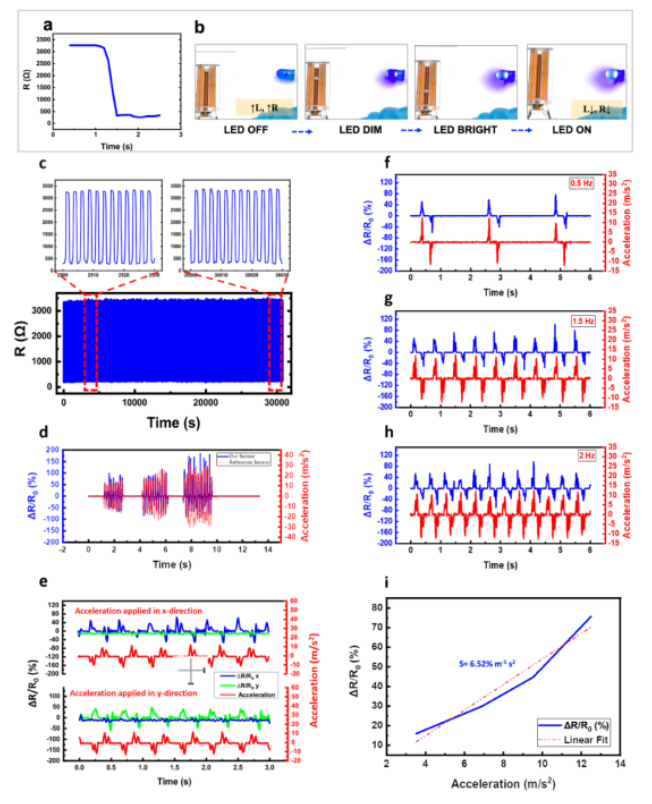
圖3. 基于液態(tài)金屬的慣性傳感器角色塑造。(a 和 b)通過控制 LED 的強(qiáng)度和電極的相應(yīng)電阻變化作為 LM 液滴位置的函數(shù),可視化 LM 啟用的可變電阻概念的時間推移序列圖像。(c) LM 型慣性電阻傳感器循環(huán)滾動試驗(yàn)的輸出。(d)慣性傳感器的電阻變化輸出相對于參考加速度計(jì)的輸出隨機(jī)應(yīng)用運(yùn)動。(e)當(dāng)沿 x 和 y 方向分別施加加速度時,組裝的兩軸傳感器的輸出。(f-h)慣性傳感器在軸加速度下的電阻變化輸出隨0.5 -2赫茲加速度頻率的變化。(i)輸出電阻隨加速度的變化。
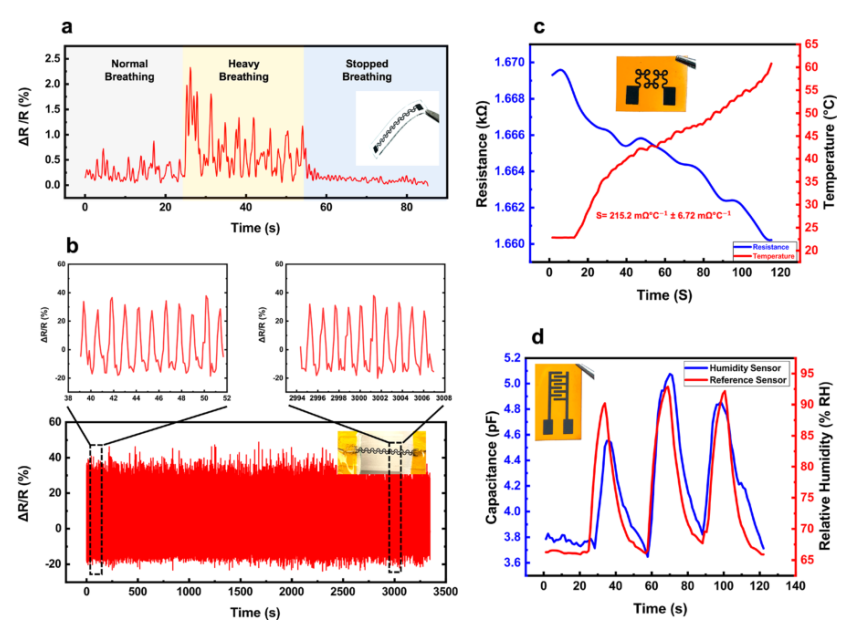
圖4. 多功能石墨烯-平臺角色塑造。(a)應(yīng)變傳感器連接到人體皮膚時測量呼吸模式的實(shí)時響應(yīng)。(b)應(yīng)變傳感器在6.5% 應(yīng)變電阻拉伸下的循環(huán)試驗(yàn)響應(yīng)。(c) LIG 溫度傳感器的電阻與環(huán)境溫度的角色塑造圖。(d)角色塑造濕度傳感器的電容與相對濕度圖(當(dāng)暴露于人體呼吸的交替間隔時間時)。
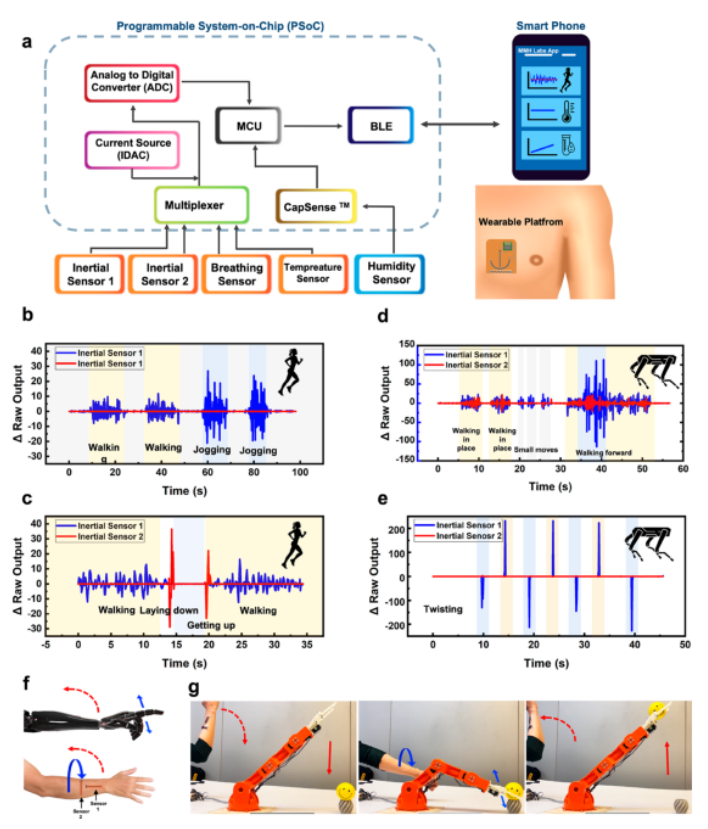
圖5. 平臺系統(tǒng)集成和應(yīng)用。(a)集成信號處理和實(shí)時無線傳輸功能的可穿戴多功能平臺的系統(tǒng)框圖。(b和c)實(shí)時身體活動監(jiān)測,其示出了當(dāng)附著到執(zhí)行諸如靜止站立、行走、慢跑、躺下和起床等任務(wù)的人類對象的胸部時,傳感器的電阻變化的原始輸出。(d和e)實(shí)時身體活動監(jiān)測,顯示了當(dāng)附著在執(zhí)行原地行走、小運(yùn)動、向前行走和扭轉(zhuǎn)等運(yùn)動的腿式機(jī)器人的背部時,傳感器的電阻變化的原始輸出。(f)所開發(fā)的基于LM的慣性傳感器在軟人機(jī)界面中的應(yīng)用示意圖。(g)使用開發(fā)的慣性傳感器拍攝的機(jī)械臂控制的連續(xù)延時照片。
相關(guān)科研成果由阿卜杜拉國王科技大學(xué)Wedyan Babatain和Muhammad Mustafa Hussain等人于2022年發(fā)表在ACS Nano(https://doi.org/10.1021/acsnano.2c06180)上。原文:Graphene and Liquid Metal Integrated Multifunctional Wearable Platform for Monitoring Motion and Human–Machine Interfacing。
轉(zhuǎn)自《石墨烯研究》公眾號