在開發(fā)可編程的束縛式軟機器人方面,人們的興趣與日俱增,但也面臨著巨大的挑戰(zhàn)。在這里,我們通過在拉伸和壓縮條件下應用堆疊石墨烯組件(SGA)的不對稱彈塑性來應對這一挑戰(zhàn)。我們將SGA轉移到聚乙烯(PE)膜上,得到的SGA/PE雙層膜,該膜表現(xiàn)出快速的變形行為以響應周圍溫度的變化。通過使用帶圖案的SGA和/或局部回火預處理,還可以根據(jù)需要對此類熱誘導變形系統(tǒng)的初始配置進行編程,從而形成具有復雜三維結構的各種驅動系統(tǒng)。更重要的是,與普通的雙層驅動器不同,我們的SGA/PE雙層在經(jīng)過嚴格的回火處理后會自發(fā)卷曲成卷,從而可以在紅外照明下實現(xiàn)滾動運動,從而產生不受束縛的光驅動電機。SGA的非對稱彈塑性賦予基于SGA的雙材料,在開發(fā)具有高度配置可編程性的無束縛軟機器人方面具有廣闊的應用前景。
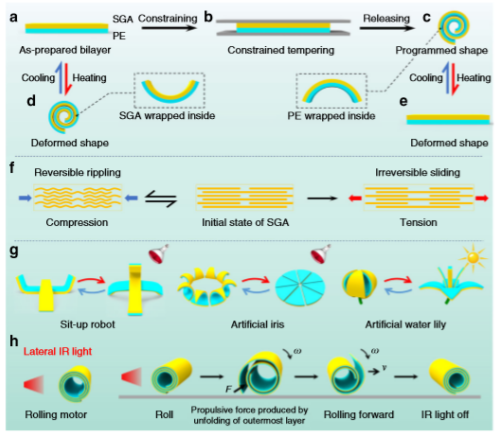
Fig. 1 基于SGA/PE雙層膜的可編程熱誘導形變系統(tǒng)插圖。
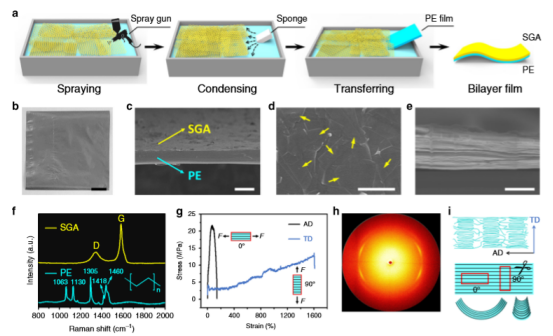
Fig. 2 SGA/PE雙層膜的制備與表征。
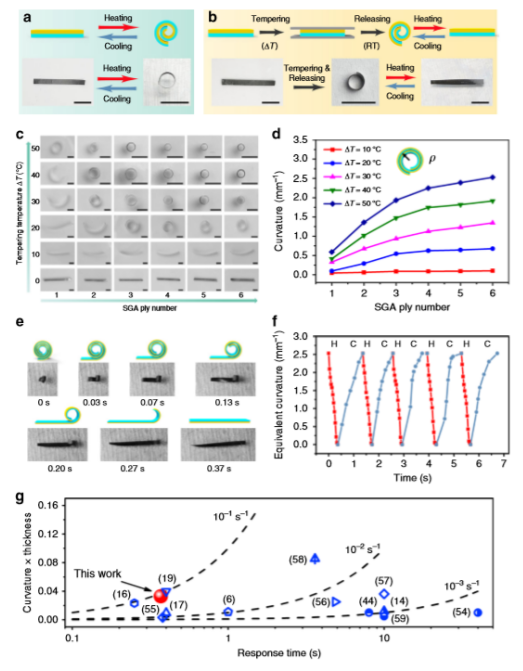
Fig. 3 SGA/PE薄膜的熱誘導變形行為。
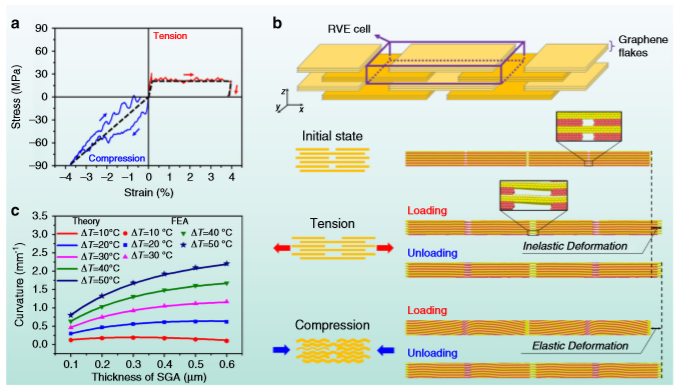
Fig. 4 SGA非對稱彈塑性數(shù)值驗證。
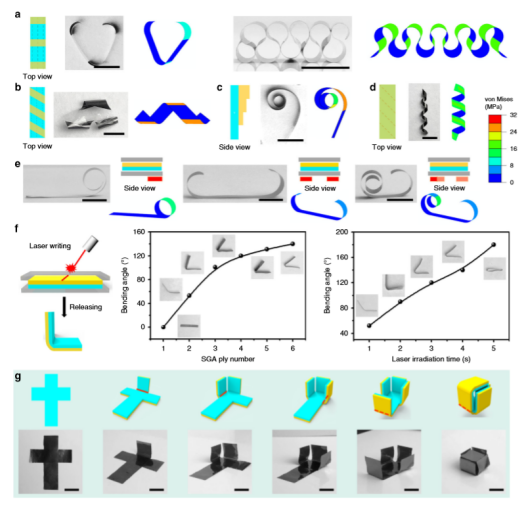
Fig. 5 通過各種策略可以實現(xiàn)基于SGA/PE的變形系統(tǒng)的可編程配置。
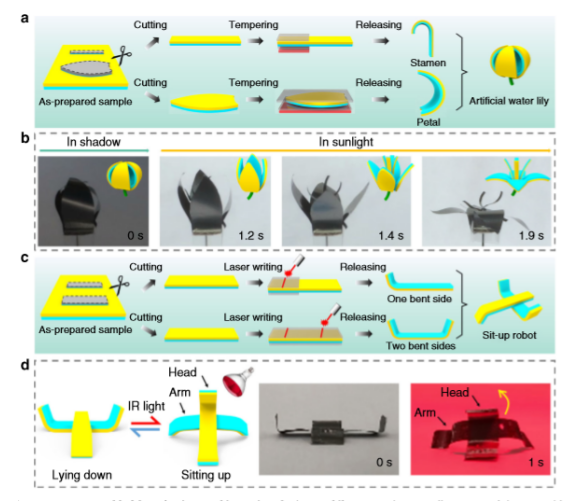
Fig. 6 由SGA/PE雙層基本變形單元組成的典型變形系統(tǒng)。
相關研究成果于2020年由中國科學院寧波材料技術與工程研究所Tao Chen課題組,發(fā)表在Nature Communications (https://doi.org/10.1038/s41467-020-18214-0)上。原文:Asymmetric elastoplasticity of stacked graphene assembly actualizes programmable untethered soft robotics。
摘自《石墨烯雜志》公眾號:
.jpg)